俧俫倸懷偺俹俴俴偱偼婎弨怣崋偵侾侽俵俫倸傪巊偆偲俠俶偺揰偱枮懌側惈擻偑弌側偄偙偲偑敾傝丄侾侽侽俵俫倸俷俠倃俷傪婎弨怣崋偲偟偰巊偆偙偲偑懡偔側傝傑偟偨丅
偨偲偊偽侾侽俵俫倸偺OCXO傪婎弨偵偟偰侾侽俧俫倸偺怣崋偵俹俴俴傪偐偗傞偲丄1000掽攞乮佮俀偺10忔攞乯偟偨偙偲偵側傝傑偡偺偱丄俷俠倃俷偺埵憡嶨壒偑奣偹60dB乮亖6dB亊10乯憹暆偝傟偰侾侽俧俫倸偺怣崋傪曄挷偟傑偡丅侾侽俵俫倸偺婎弨怣崋偺CN偑-150dBc偺応崌丄侾侽俧俫倸偺CN偼偳傫側偵婃挘偭偰傕-90dBc偵側偭偰偟傑偄傑偡丅
CN偑摨掱搙偺侾侽侽俵俫倸偺俷俠倃俷傪巊偭偰侾侽俧俫倸傪嶌傞偲100掽攞乮佮2偺6.6忔攞乯側偺偱40dB乮佮6dB亊6.6乯憹暆偝傟傑偡偑丄10GHz偺怣崋偺CN偼-110dBc傪慱偊傞偙偲偵側傝傑偡丅
偙偺傛偆偵丄俹俴俴偺婎弨廃攇悢偑崅偄曽偑俠俶偼椙偔側傝傑偡丅
偲偙傠偑丄侾侽侽俵俫倸偺俷俠倃俷偼壏搙曗彏偑偝傟偰偄傞偺偱廃攇悢曄摦偼彫偝偄偺偱偡偑丄偦傟偱傕侾侽俧俫倸埲忋偺俹俴俴偵偮偐偆偲僪儕僼僩偑栚棫偪傑偡丅WSJT側偳偺嫹懷堟儌乕僪偱偼晄廫暘側埨掕搙偱偡丅侾侽俵俫倸偺俷俠倃俷偵斾傋傞偲曄摦偑戝偒偄條偱偡丅
侾侽俵俫倸偺怣崋傪俹俴俴偺婎弨偵偡傟偽僪儕僼僩偼彫偝偔側傞偑俠俶偑埆偔側傞偲尵偆僕儗儞儅偱偡丅俧俹俽庴怣婡側偳偺怣崋偼丄廃攇悢偼惓妋偱偡偑丄嶨壒偑懡偔娷傑傟傞偙偲偑偁傝丄偙傟傪俹俴俴偺婎弨怣崋偵偡傞偲俠俶偺傂偳偔埆偄敪怳婍偵側偭偰偟傑偟傑偡丅
偦偙偱丄侾侽侽俵俫倸偺俷俠倃俷偵俧俹俽摨婜傪妡偗傞憰抲傪嶌傝丄崅偄俠俶偲崅偄埨掕搙傪摨帪偵払惉弌棃傞偙偲傪妋偐傔傑偟偨丅
乮侾乯 峔惉
俧俹俽庴怣婡偐傜偺侾侽俵俫倸婎弨怣崋傪俀暘廃偟偰俆俵俫倸偺婎弨怣崋傪嶌傝傑偡丅
俷俠倃俷偺怣崋傪俀侽暘廃偟偰俆MHz偵偟偰丄婎弨怣崋偲埵憡斾妑偟偰岆嵎怣崋傪偮偔傝傑偡丅
岆嵎怣崋偼儖乕僾僼傿儖僞偱暯妸壔丄埵憡曗彏傪偟偰俷俠倃俷偺惂屼揹埑偵僼傿乕僪僶僢僋偟傑偡丅俹俴俴偺懷堟傪廫暘嫹偔偡傞偙偲偱丄婎弨怣崋偵娷傑傟傞嶨壒惉暘傪彍嫀偟偰偄傑偡丅
埵憡斾妑夞楬偵偼EX-OR僞僀僾傪梡偄偰偄傑偡丅傑偨丄儘僢僋専弌傕壜擻偱偡丅
側偍丄俧俹俽庴怣婡偺侾侽俵俫倸偑柍偄偲偒偺僼儕乕儔儞廃攇悢偼丄婎斅忋偺倁俼偱挷惍偱偒傑偡偺偱丄GPS庴怣婡偑柍偄偲偒偵傕偁傞掱搙惓妋側廃攇悢偱摦嶌偟傑偡丅
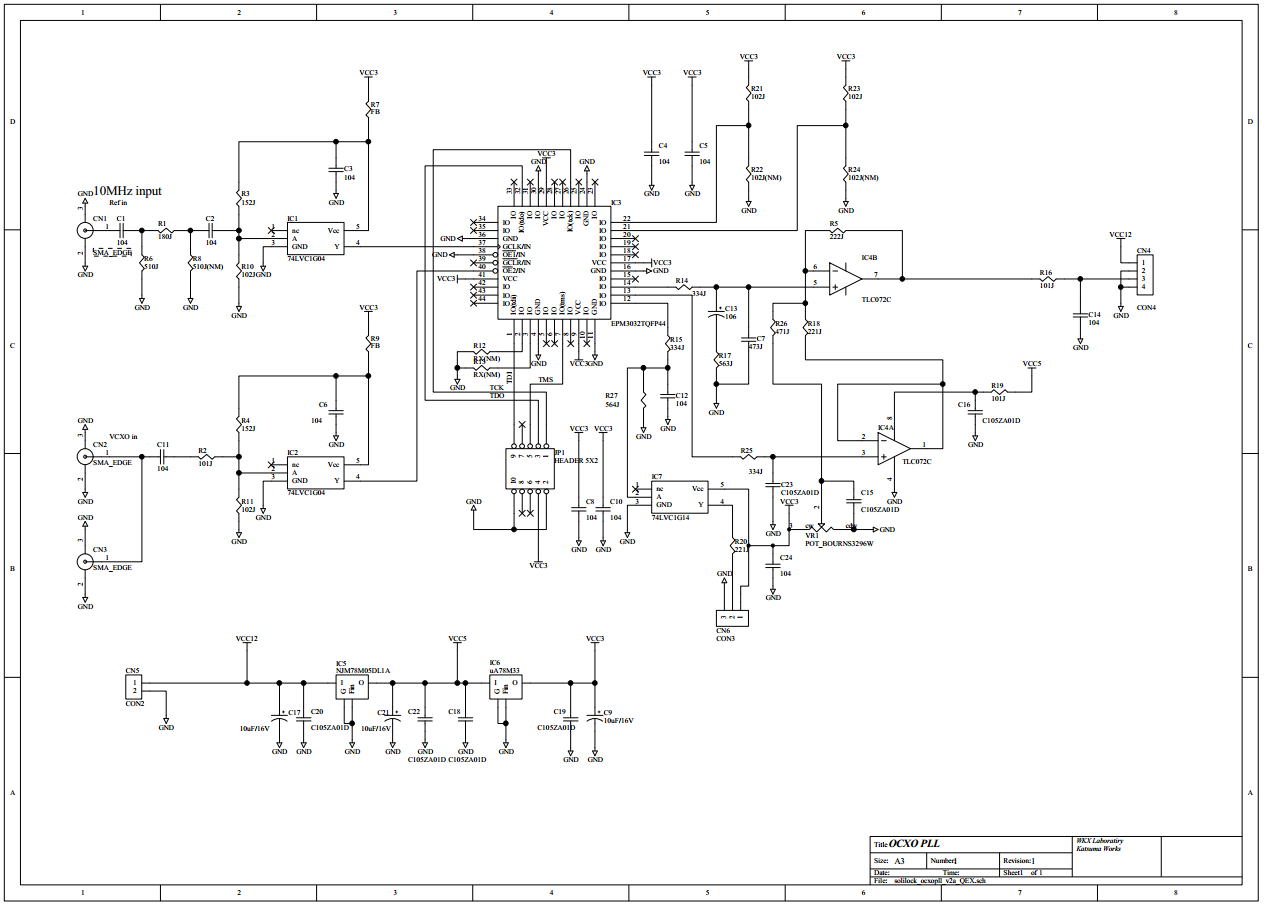
夞楬恾傪僟僂儞儘乕僪偡傞丅
晹昳昞傪僟僂儞儘乕僪偡傞丅
乮俀乯 岺嶌
暘廃婍丄埵憡斾妑婍偼傾儖僥儔幮偺CPLD乮僾儘僌儔儅僽儖儘僕僢僋夞楬乯偺EPM3032偱嶌傝傑偟偨丅僾儘僌儔儉偼AHDL乮傾儖僥儔偺尵岅乯偲Verilog偺擇捠傝彂偒傑偟偨丅偳偪傜傕摦嶌偟傑偟偨乮摉偨傝慜乯偑丄埵憡斾妑婍偺偲偙傠偼AHDL偺曽偑彂偒傗偡偔姶偠傑偟偨丅
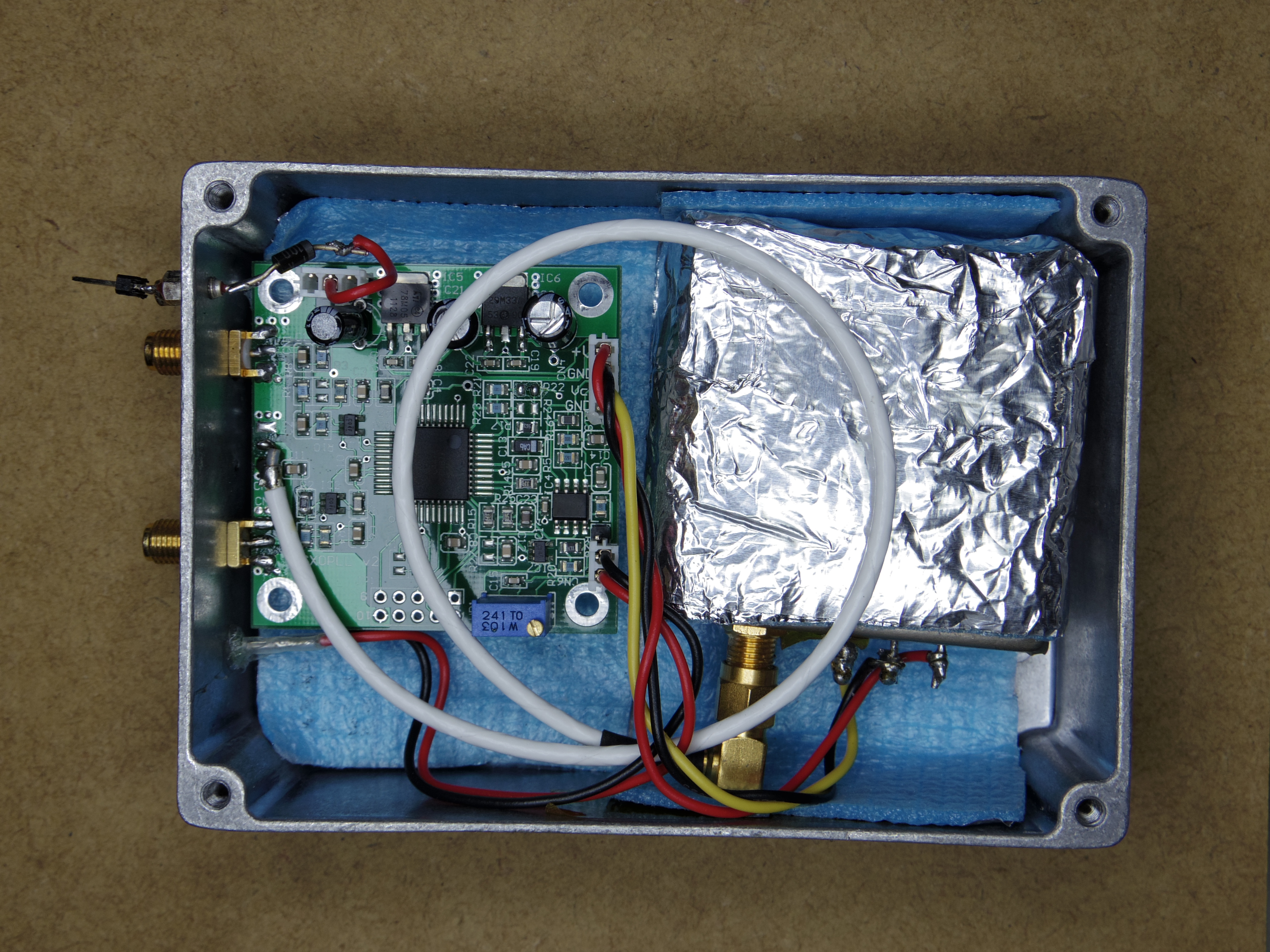
夞楬偼僾儕儞僩婎斅嶌傝婎斅忋偵幚憰偟傑偡丅
僾儕儞僩婎斅偼椉柺婎斅偱50mm亊50mm偺戝偒偝偱偡丅
OCXO偵偼抐擬嵽乮100嬒偺偍晽楥曐壏僔乕僩乯傪姫偒晅偗偰偁傝傑偡丅OCXO偲夞楬婎斅偼僟僀僉儍僗僩働乕僗偵慻傒崬傒傑偟偨丅
婎斅惢憿偵昁梫側僈乕僶乕僨乕僞傪僟僂儞儘乕僪偡傞丅
CPLD偺僜乕僗僼傽僀儖乮tdf乯傪僟僂儞儘乕僪偡傞丅
CPLD偺彂偒崬傒僼傽僀儖乮pof乯傪僟僂儞儘乕僪偡傞丅
CPLD傊偺彂偒崬傒偼丄ALTERA偺奐敪娐嫬偑昁梫偱偡丅ALTERA幮偺web僒僀僩偐傜柍彏偱僟僂儞儘乕僪弌棃傑偡丅
彂偒崬傒偺偨傔偵偼彂偒崬傒婍偑昁梫偵側傝傑偡丅儊乕僇乕弮惓昳偼旕忢偵崅壙偱偡偑丄屳姺昳傪惢嶌偝傟偨曽偑偄傜偭偟傖偄傑偡丅乽USB-Blaster傕偳偒偺惢嶌乿偱専嶕偟偰忣曬傪摼偰壓偝偄丅巹傕巊傢偣偰偄偨偩偄偰偄傑偡丅
乮俁乯挷惍曽朄
嘆OCXO偲PLL婎斅傪愙懕偡傞丅10MHz婎弨怣崋偼枹偩愙懕偟側偄丅
嘇揹尮侾俀V傪壛偊傞丅
嘊OCXO偺敪怳廃攇悢偑100MHz偵側傞傛偆偵婎斅忋偺VR傪挷惍偡傞丅廃攇悢偼曄摦偡傞偺偱丄奣偹悢10Hz埲撪偵廂傑傟偽傛偄丅
嘋10MHz婎弨怣崋傪愙懕偡傞丅OCXO偺僆乕僽儞偑壏傑偭偰儘僢僋偑妡偐傞傑偱悢昩偐傜1暘掱搙妡偐傞偙偲傕偁傝傑偡丅儘僢僋偡傞捈慜偼LED偑揰柵偟丄儘僢僋偡傞偲揰摂偟傑偡丅
儘僢僋偟偨忬懺偱偼丄100MHz偵懳偟偰10mHz掱搙偺岆嵎偵側傞偲巚偄傑偡丅
儘僢僋専弌夞楬偺嬌惈傪偁傢偣傞偨傔丄巊梡偡傞OCXO偺Vcont偲敪怳廃攇悢偺娭學偑惓僗儘乕僾乮揹埑傪忋偘傞偲廃攇悢偑崅偔側傞乯偺応崌偼丄R22偺儔儞僪傪僔儑乕僩偟偰偔偩偝偄丅晧僗儘乕僾偺応崌偼R22傪僆乕僾儞偵偟偰偔偩偝偄丅側偍丄僆乕僾儞丒僔儑乕僩偺偳偪傜偱傕廃攇悢偼儘僢僋偟傑偡丅
乮係乯寢壥
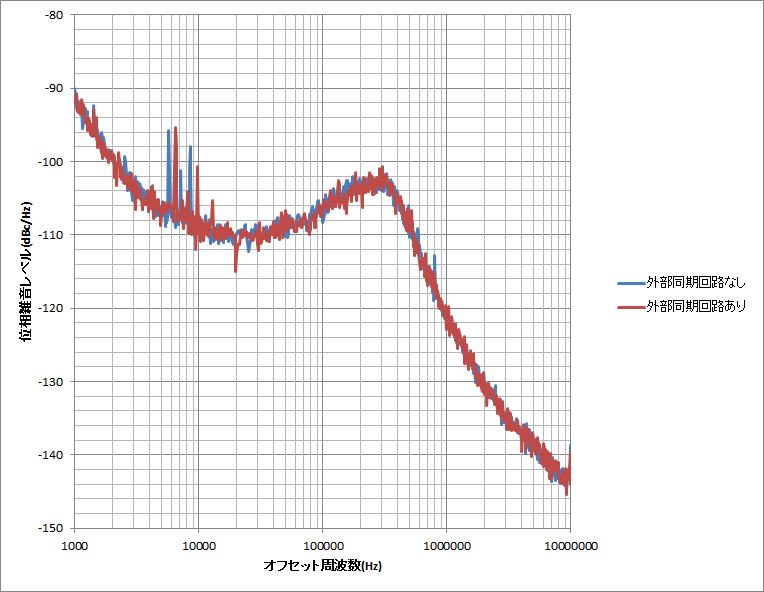
惢嶌偟偨俧俹俽摨婜俷俠倃俷傪俽倧倢倝倢倧們倠侾侽俧丂倁倕倰俀偺婎弨怣崋偲偟偰摦嶌偝偣丄埵憡嶨壒傪應掕偟傑偟偨丅敪怳廃攇悢偼8400MHz偱偡丅
GPS摨婜偝偣側偄慺偺OCXO偲丄GPS摨婜偝偣偨OCXO偺斾妑傪偟偨偲偙傠丄僲僀僘儗儀儖偼傎偲傫偳曄壔偣偢丄GPS摨婜偝偣偨偙偲偵傛傞暰奞偼柍偄偙偲偑敾傝傑偟偨丅偳偪傜傕僆僼僙僢僩廃攇悢10kHz偱-110dBc/Hz掱搙偱偡丅